
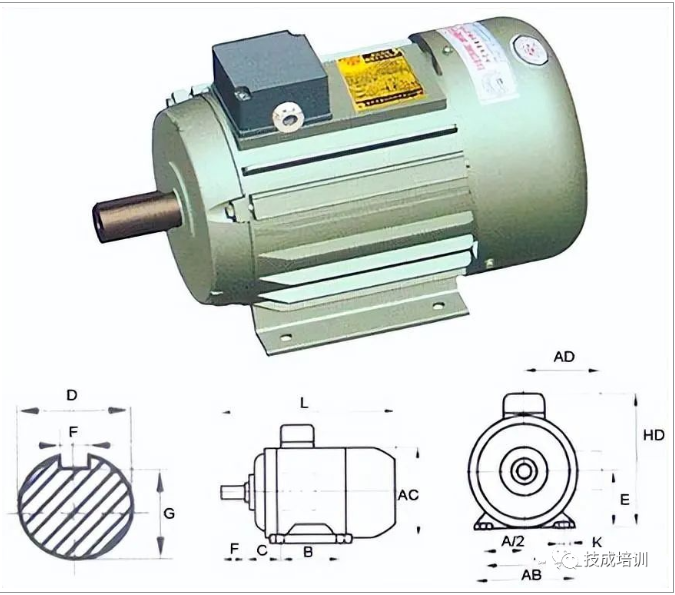
Ein dreiphasiger AsynchronmotorMotorist eine Art Induktionsmotor, der durch gleichzeitigen Anschluss eines dreiphasigen Wechselstroms von 380 V (Phasenunterschied von 120 Grad) angetrieben wird. Aufgrund der Tatsache, dass das rotierende Magnetfeld von Rotor und Stator eines Drehstrom-Asynchronmotors in die gleiche Richtung und mit unterschiedlichen Geschwindigkeiten rotiert, entsteht ein Schlupf, weshalb er als Drehstrom-Asynchronmotor bezeichnet wird.
Die Drehzahl des Rotors eines Drehstrom-Asynchronmotors ist geringer als die Drehzahl des rotierenden Magnetfeldes. Die Rotorwicklung erzeugt aufgrund der Relativbewegung zum Magnetfeld eine elektromotorische Kraft und einen Strom und interagiert mit dem Magnetfeld, um ein elektromagnetisches Drehmoment zu erzeugen und so eine Energieumwandlung zu erreichen.
Im Vergleich zu einphasigen asynchronenMotoren, dreiphasig asynchronMotorenhaben eine bessere Betriebsleistung und können verschiedene Materialien einsparen.
Entsprechend den unterschiedlichen Rotorstrukturen können dreiphasige Asynchronmotoren in Käfigtyp und Wickeltyp unterteilt werden
Der Asynchronmotor mit Käfigläufer hat einen einfachen Aufbau, einen zuverlässigen Betrieb, ein geringes Gewicht und einen niedrigen Preis, der weit verbreitet ist. Sein Hauptnachteil ist die Schwierigkeit bei der Geschwindigkeitsregulierung.
Rotor und Stator eines gewickelten Drehstrom-Asynchronmotors sind ebenfalls mit Drehstromwicklungen ausgestattet und über Schleifringe und Bürsten mit einem externen Rheostat verbunden. Durch Anpassen des Widerstands des Rheostaten kann die Startleistung des Motors verbessert und die Drehzahl des Motors angepasst werden.
Das Funktionsprinzip eines dreiphasigen Asynchronmotors
Wenn symmetrischer dreiphasiger Wechselstrom an die dreiphasige Statorwicklung angelegt wird, wird ein rotierendes Magnetfeld erzeugt, das sich im Uhrzeigersinn entlang des inneren kreisförmigen Raums von Stator und Rotor mit der Synchrondrehzahl n1 dreht.
Da sich das rotierende Magnetfeld mit der Geschwindigkeit n1 dreht, ist der Rotorleiter zu Beginn stationär, sodass der Rotorleiter das rotierende Magnetfeld des Stators unterbricht, um eine induzierte elektromotorische Kraft zu erzeugen (die Richtung der induzierten elektromotorischen Kraft wird durch die rechte Hand bestimmt). Regel).
Aufgrund des Kurzschlusses des Rotorleiters an beiden Enden durch einen Kurzschlussring erzeugt der Rotorleiter unter der Wirkung der induzierten elektromotorischen Kraft einen induzierten Strom, der grundsätzlich in die gleiche Richtung wie die induzierte elektromotorische Kraft verläuft. Der stromdurchflossene Leiter des Rotors ist im Statormagnetfeld einer elektromagnetischen Kraft ausgesetzt (die Richtung der Kraft wird anhand der Links-Hand-Regel bestimmt). Elektromagnetische Kraft erzeugt ein elektromagnetisches Drehmoment an der Rotorwelle und treibt den Rotor an, sich in Richtung des rotierenden Magnetfelds zu drehen.
Aus der obigen Analyse lässt sich schließen, dass das Funktionsprinzip eines Elektromotors wie folgt ist: Die dreiphasigen Statorwicklungen des Motors (jeweils mit einem elektrischen Winkelunterschied von 120 Grad) werden mit dreiphasigem symmetrischem Wechselstrom gespeist , wird ein rotierendes Magnetfeld erzeugt, das die Rotorwicklung durchschneidet und einen induzierten Strom in der Rotorwicklung erzeugt (die Rotorwicklung ist ein geschlossener Stromkreis). Der stromführende Rotorleiter erzeugt unter der Wirkung des rotierenden Magnetfelds des Stators eine elektromagnetische Kraft. Dadurch entsteht an der Motorwelle ein elektromagnetisches Drehmoment, das den Motor in die gleiche Richtung wie das rotierende Magnetfeld dreht.
Schaltplan eines Drehstrom-Asynchronmotors
Prinzipielle Verkabelung von Drehstrom-Asynchronmotoren:
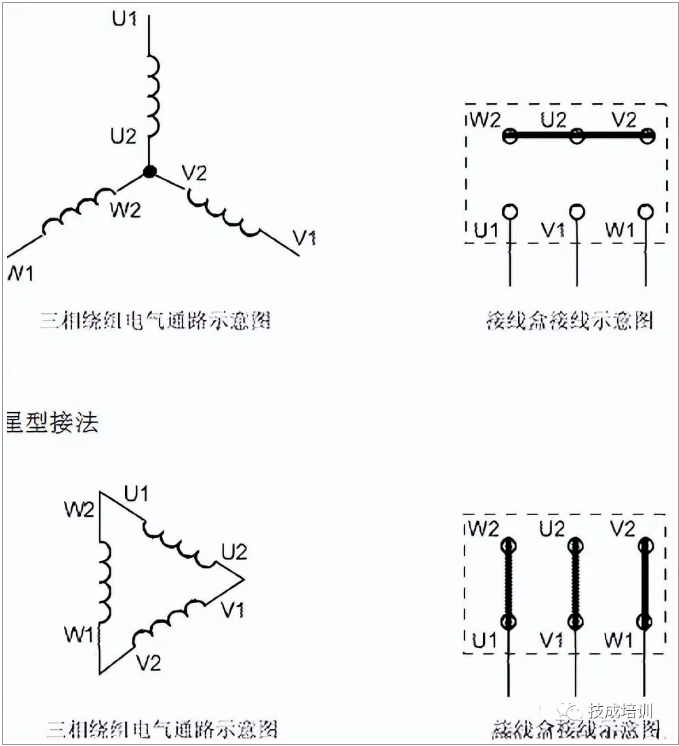
Die sechs Drähte der Wicklung eines Drehstrom-Asynchronmotors lassen sich in zwei grundsätzliche Anschlussarten unterteilen: Dreieck-Dreieck-Anschluss und Sternanschluss.
Sechs Drähte = drei Motorwicklungen = drei Kopfenden + drei Schwanzenden, wobei ein Multimeter die Verbindung zwischen den Kopf- und Schwanzenden derselben Wicklung misst, dh U1-U2, V1-V2, W1-W2.
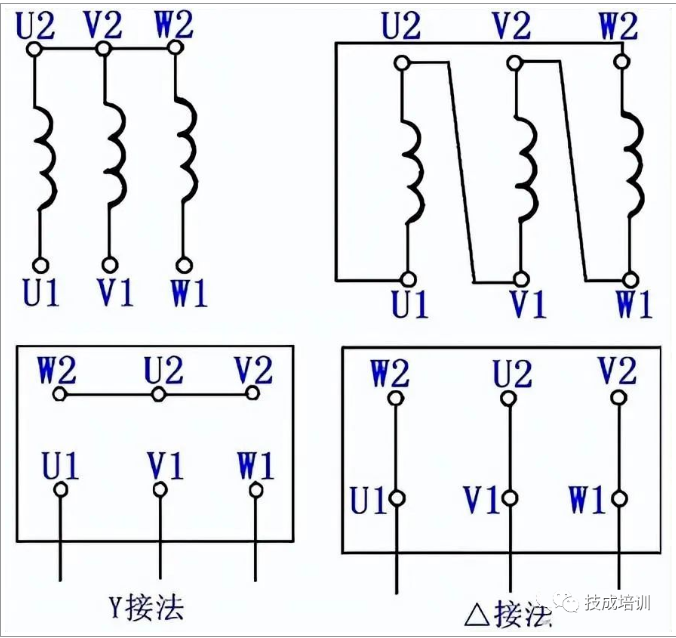
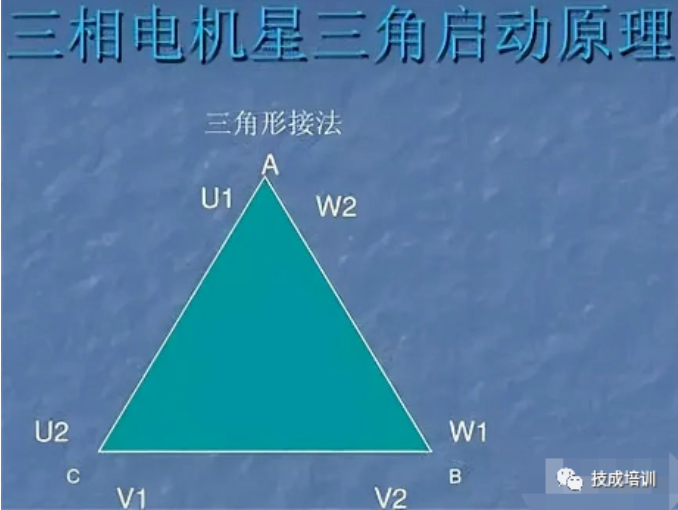
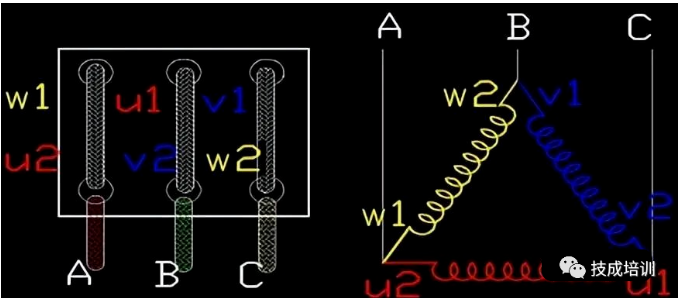
1. Dreieck-Dreieck-Verbindungsmethode für dreiphasige Asynchronmotoren
Bei der Dreieck-Delta-Verbindungsmethode werden die Köpfe und Enden der drei Wicklungen nacheinander verbunden, um ein Dreieck zu bilden, wie in der Abbildung dargestellt:
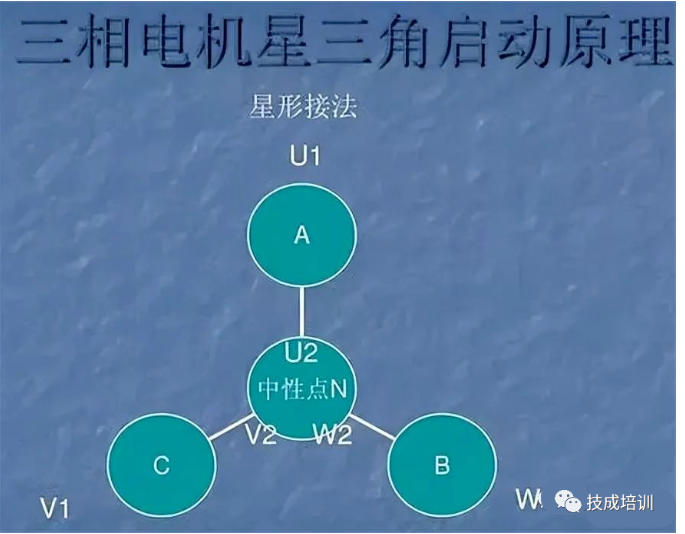
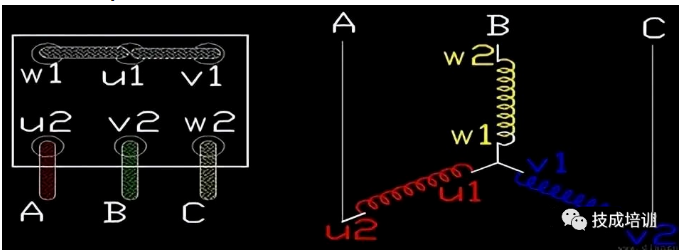
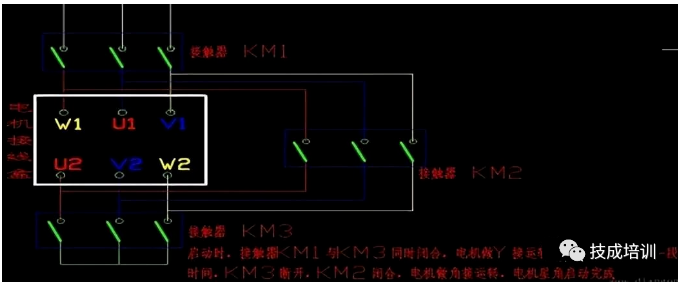
2. Sternschaltungsmethode für Drehstrom-Asynchronmotoren
Bei der Sternverbindungsmethode werden die Schwanz- oder Kopfenden von drei Wicklungen verbunden, und die anderen drei Drähte werden als Stromanschlüsse verwendet. Verbindungsmethode wie in der Abbildung gezeigt:
Erläuterung des Schaltplans eines Dreiphasen-Asynchronmotors in Abbildungen und Text
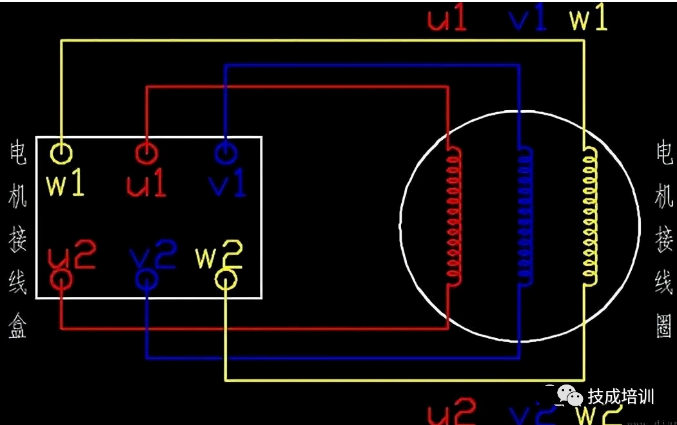
Anschlusskasten für Dreiphasenmotoren
Beim Anschluss des Drehstrom-Asynchronmotors ist die Anschlussart des Anschlussstücks im Anschlusskasten wie folgt:
Wenn der dreiphasige Asynchronmotor über Eck angeschlossen wird, ist die Anschlussmethode des Anschlusskasten-Verbindungsstücks wie folgt:
Für Drehstrom-Asynchronmotoren gibt es zwei Anschlussarten: Sternanschluss und Dreieckanschluss.
Triangulationsmethode
Beim Wickeln von Spulen mit gleicher Spannung und gleichem Drahtdurchmesser hat die Sternverbindungsmethode dreimal weniger Windungen pro Phase (1,732-mal) und dreimal weniger Leistung als die Dreiecksverbindungsmethode. Die Anschlussmethode des fertigen Motors ist auf eine Spannung von 380 V ausgelegt und eignet sich im Allgemeinen nicht für Änderungen.
Die Anschlussart kann nur geändert werden, wenn der dreiphasige Spannungspegel von den normalen 380 V abweicht. Wenn beispielsweise die dreiphasige Spannung 220 V beträgt, kann es sinnvoll sein, die Sternverbindungsmethode der ursprünglichen dreiphasigen Spannung von 380 V auf die Dreiecksverbindungsmethode umzustellen. Wenn der dreiphasige Spannungspegel 660 V beträgt, kann die ursprüngliche Dreiecksverbindungsmethode der dreiphasigen Spannung von 380 V auf die Sternverbindungsmethode geändert werden, und die Leistung bleibt unverändert. Im Allgemeinen werden Motoren mit geringer Leistung im Stern geschaltet, während Motoren mit hoher Leistung im Dreieck geschaltet werden.
Bei Nennspannung sollte ein in Dreieck geschalteter Motor verwendet werden. Wenn auf einen Motor mit Sternschaltung umgestellt wird, handelt es sich um einen Betrieb mit reduzierter Spannung, was zu einer Verringerung der Motorleistung und des Anlaufstroms führt. Beim Starten eines Hochleistungsmotors (Dreieckschaltung) ist der Strom sehr hoch. Um die Auswirkungen des Anlaufstroms auf die Leitung zu verringern, wird im Allgemeinen ein Abwärtsstart eingesetzt. Eine Methode besteht darin, die ursprüngliche Delta-Verbindungsmethode zum Starten in eine Stern-Verbindungsmethode zu ändern. Nachdem die Sternverbindungsmethode gestartet wurde, wird sie für den Betrieb wieder in die Deltaverbindungsmethode umgewandelt.
Schaltplan eines Drehstrom-Asynchronmotors
Physikalisches Diagramm der Vorwärts- und Rückwärtsübertragungsleitungen für Drehstrom-Asynchronmotoren:
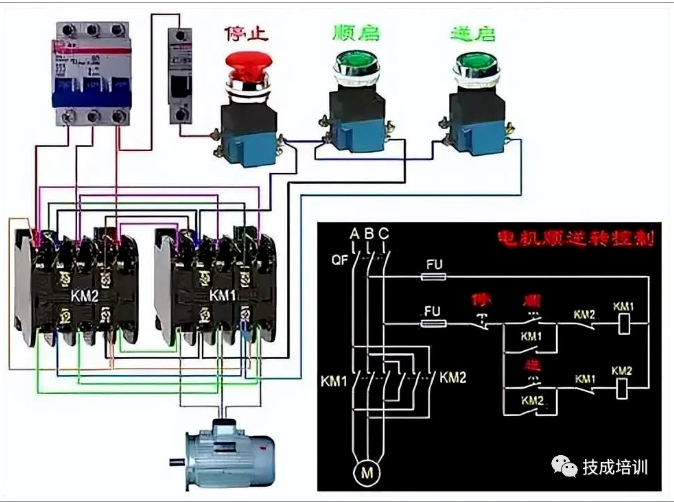
Um die Vorwärts- und Rückwärtssteuerung eines Motors zu erreichen, können zwei beliebige Phasen seiner Stromversorgung relativ zueinander angepasst werden (wir nennen das Kommutierung). Normalerweise bleibt die V-Phase unverändert und die U-Phase und die W-Phase werden relativ zueinander angepasst. Um sicherzustellen, dass die Phasenfolge des Motors beim Wirken zweier Schütze zuverlässig vertauscht werden kann, sollte die Verdrahtung am oberen Anschluss des Kontakts einheitlich sein und am unteren Anschluss des Schützes die Phase angepasst werden. Aufgrund der Vertauschung der Phasenfolge der beiden Phasen muss sichergestellt werden, dass die beiden KM-Spulen nicht gleichzeitig eingeschaltet werden können, da es sonst zu schwerwiegenden Phasenkurzschlüssen kommen kann. Daher muss eine Verriegelung übernommen werden.
Aus Sicherheitsgründen wird häufig ein doppelt verriegelter Vorwärts- und Rückwärtssteuerkreis mit Tastenverriegelung (mechanisch) und Schützverriegelung (elektrisch) verwendet; Durch die Tastenverriegelung können die beiden für die Phaseneinstellung verwendeten Schütze nicht gleichzeitig eingeschaltet werden, selbst wenn die Vorwärts- und Rückwärtstasten gleichzeitig gedrückt werden, wodurch mechanisch Kurzschlüsse zwischen Phasen vermieden werden.
Aufgrund der Verriegelung der eingesetzten Schütze wird außerdem der lange geschlossene Kontakt eines der Schütze nicht geschlossen, solange einer der Schütze eingeschaltet ist. Auf diese Weise kann es bei der Anwendung der mechanischen und elektrischen Doppelverriegelung im Stromversorgungssystem des Motors nicht zu Phase-Phase-Kurzschlüssen kommen, was den Motor wirksam schützt und Unfälle durch Phase-Phase-Kurzschlüsse während der Phasenmodulation vermeidet, die zu Verbrennungen führen können Schütz.
Zeitpunkt der Veröffentlichung: 07.08.2023


